R E S E A R C H @ H K U S T
41
it structure its own interactions. It has to learn
from its interactions, like a baby. We then have
something that is adaptive.”
By combining the latest advances in unsupervised
machine learning and reinforcement learning, the
team formulated a mathematical model for the
simultaneous development of perception and action
that encapsulated a simple idea. Perception develops
in order to enable an organism to understand the
environment based on the input from its sensory
organs. Behavior develops to stabilize the sensory
input to simplify the process of understanding
the environment.
The focus for their application of AEC is the visual
system, which is vital for the more autonomous
machines of the future if they are not only to “see”
but can also respond to what they “see”. For the
robot, this involves creating a sight system that can
track and follow an object and then stabilize the
image of the object captured by video camera to make
it easier to understand. It then creates an internal
representation of the environmental state. The team
is experimenting with robots that can control the
angle incline of the eyes, moving their position as an
object comes closer, and with an arm programmed to
move to that location.
The system continuously recalibrates itself,
learning by failing and trying again – a process that
Prof Shi also describes as “babbling”, like a baby
babbles as it learns to talk. This process happens
dynamically whenever the system is operating, just
as learning is always active in biological organisms.
In another breakthrough, the team has demonstrated
that the system exhibits another important biological
capability: self-repair. Using the framework, a robot,
if injured, can automatically readapt itself.
While the HKUST researchers are now refining
this technology, Prof Shi is confident that it will not
be long before the eye movement system is ready
for application outside the laboratory, for medical,
consumer, and industrial uses. He expects this
capability to be built into robots used in industrial
settings to support greater automation in
manufacturing processes that require more
human-robot interaction – where the human
understands the robot, and vice versa.
Medical applications for systems using the AEC
framework are also being developed. For example,
Prof Shi’s collaborators in Germany are now working
to apply the principle to the development of virtual
reality training systems to improve sensorimotor
coordination in patients with eye movement
disorders. “Robots that mimic the brain’s ability to
adapt might one day be able to help the biological
systemwhen things go awry,” said Prof Shi.
Prof Shi’s team comprises a group of
multidisciplinary talents who are at the core of its
success. “They need strong math skills to understand
the algorithms, and coding skills, and a focus
informed by engineering, neural science, and physics,
as well as creativity and imagination,” he said.
PROF BERTRAM SHI
Professor and Head,
Department of
Electronic and
Computer Engineering
From human
biology we can
drawmuch
to inspire our
understanding of
the development
of robotics
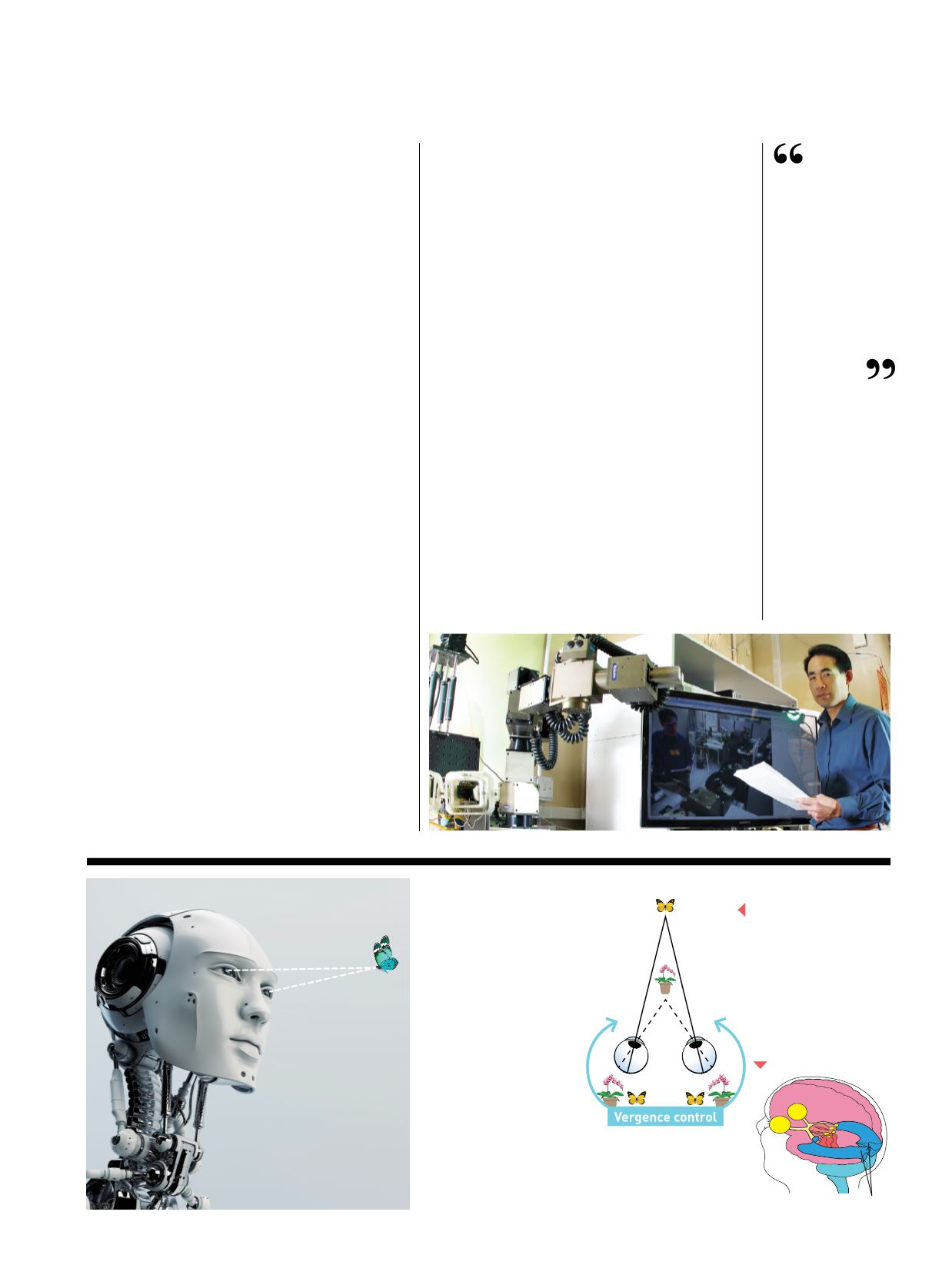
Objects at different depths
appear at different points in
the retinae of the two eyes.
In humans, visual
information from the two
eyes is routed separately to
an area of the brain in the
back of the head known as
the primary visual cortex,
where information from
the two eyes is combined.
Primary visual cortex
a
b
Vergence Eye Movements
Objects in the world appear at
different points in the two retinae
depending on their depth (Figure a).
Humans perform vergence eye
movements, which adjust the
anglebetween the twoeyes,
to align the images on
the two retinae so that
they can be fused into
one coherent percept.
Generating the correct
control signals requires
information from the two eyes to be combined (Figure b).
Human babies normally learn how to do this four months
after birth. The Active Efficient Coding (AEC) provides an
account for how this behavior emerges.


