27
E M E R G I N G T E C H N O L O G I E S
R E S E A R C H @ H K U S
2014
2015
Frank Wang, Prof Zexiang Li and
their team built a quadrotor drone,
less than one meter in diameter,
carrying a camera to capture stills
and motion, with GPS navigation
and communication data links.
HKUST PhD student Guyue Zhou
developed a flying robot prototype
with vision navigation, giving rise
to the UAV Guidance System.
Prof Shaojie Shen developed
technology to free UAVs from
GPS control, equipping the flying
robot with its own intelligence to
navigate more autonomously and
respond more independently to
real-time conditions.
2011
Going
Solo
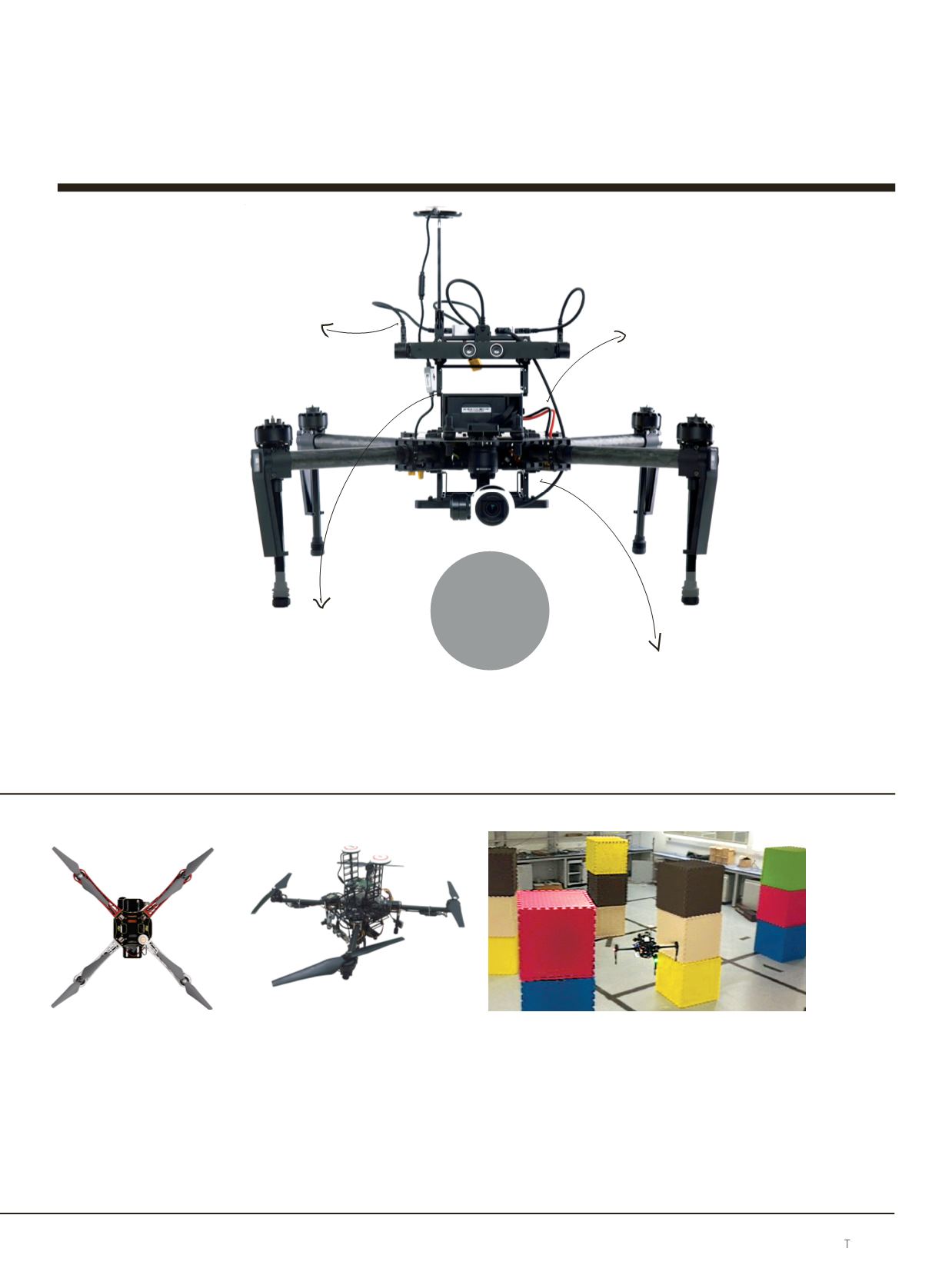
Brain
Advanced HKUST motion planning
algorithms, including autonomous navigation,
state estimation and perception technologies,
increase the sensitivity of the flying robot and
its ability to respond to its environment within
20 milliseconds of real time. This means the
flying robot can independently plan its flight
path.
Eye
On-board computer vision system acts like
the eye of the drone, processing information
at 50Hz – faster than a cell phone camera.
Through visual-inertial fusion, information
from the drone’s camera is combined and
processed by an inertial sensor, delivering
increased accuracy at greater speeds.
Flight controller
Advanced flight control enables the flying robot
to be fast and agile, and to respond to the
changing dynamics of the three-dimensional
environment of the air, rapidly changing
orientation or altitude without becoming
unstable.
Gimbal camera
stabilizing device
This device, coupled with communication
technology, has enabled aerial photography
and high-definition video to be shot and
streamed from 200 meters in the air to a tablet
computer in an office or at home.
EYE
INTHE SKY


