26
@
U S T . H K
W
hen the early prototypes of a
flying robot were built at HKUST just
10 years ago by then Electronic and
Computer Engineering MPhil student
Frank Wang, with the help of his supervisor
Prof Zexiang Li, peers and colleagues
described the creations as “toys”.
Yet in 2009, their unmanned min-
iature helicopter successfully made the
world’s first autonomous flights to sur-
vey Mount Everest, helping to contribute
to the commercialization of a disruptive
technology that has since opened the
way for an amazing range of innovative
civilian applications in fields as diverse as
aerial photography, search and rescue,
and even, potentially, book deliveries.
Uses should continue to expand with the
latest advances in such technology, led by
researchers at HKUST.
Key Breakthrough
The quadrotor drones that Frank, Prof Li,
and their team built – less than one meter
in diameter, sophisticated and easy to
operate – brought together important
progress in motion control, communi-
cation and navigation technologies. In
doing so, they fast-forwarded a global
consumer and business sector expected
to grow to US$4-5.6 billion by 2020,
according to market estimates.
*
The
drone industry is now dominated by DJI,
the company that Frank launched in
2006, with the help of Prof Li.
The key technological breakthrough
was achieved when Frank’s research at
HKUST employed control technologies
for low-altitude flying. This built on the
motion control applications that HKUST
faculty members had been developing
for machine tools in the manufacturing
industry. However, the motion control
requirements of an unmanned aerial
vehicle (UAV) – as drones or flying robots
are also called – are much more challeng-
ing because of unpredictable conditions in
the three-dimensional environment of the
air. This is where Frank, and the faculty
members who supported him, exerted
their expertise.
The flight controller they developed
provided stability for the flying robot,
operating in real time and fast enough
to handle the dynamics of the platform.
Hover accuracy, and agility to rapidly
change orientation or altitude without
becoming unstable, and robustness in
strong wind conditions allowed the UAV
to support further applications beyond
Frank’s original joy of flying model
* PR Newswire, MarketsandMarkets
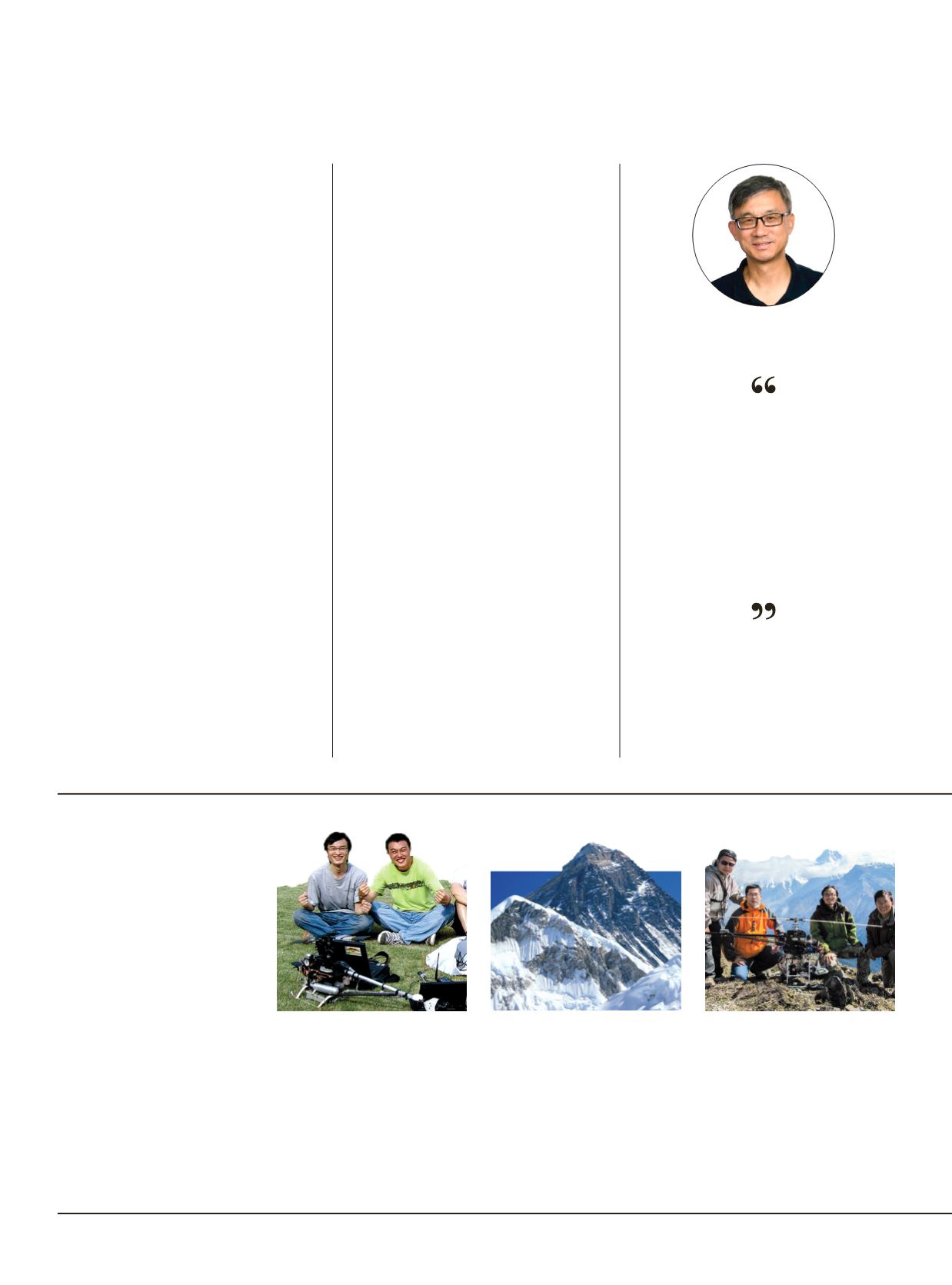
2006
2009
2010
MPhil student Frank Wang and
the team developed HKUST’s first
autonomous flying robot.
Prof Zexiang Li and his research
team’s unmanned drone made
the world’s first high-altitude
autonomous flight at Mount
Everest.
Postgraduate students, Frank
Wang and Jianyu Song, flew
their unmanned autonomous
helicopter across the Yarlung
Zangbo Grand Canyon, Tibet, the
world’s deepest canyon.
HKUST researchers
are making
landmark advances
in unmanned aerial
vehicle technology
Leading
the Way
PROF MICHAEL WANG
Professor of Mechanical and
Aerospace Engineering, Electronic
and Computer Engineering,
Director, HKUST Robotics Institute
The drones that we usually speak about
these days are essentially a flying
platform that can fly at low altitude
and low speed, with very sophisticated
functions. With that platform you can
do a lot of things, seen by the many
uses that are rapidly emerging


